Circular Motion Lab (12/3/2021)
Ryan Rong, Eiichi Fujiwara, Jenna Kim
Research Question
1) How does the speed of the bob affect its acceleration?
In the lab:
The independent variable is the tangential speed (speed an object is moving tangent to the path) of the bob in rotations per second.
The dependent variable is the acceleration of the bob, in m/s/s.
Control variables include the radius of the path the bob is spinning on and the mass of the bob.
We keep the mass constant because acceleration is affected by the mass of an object. We keep the radius constant because it affects the bob's tangential speed, which is equal to angular speed * radius.
The independent variable is the tangential speed (speed an object is moving tangent to the path) of the bob in rotations per second.
The dependent variable is the acceleration of the bob, in m/s/s.
Control variables include the radius of the path the bob is spinning on and the mass of the bob.
We keep the mass constant because acceleration is affected by the mass of an object. We keep the radius constant because it affects the bob's tangential speed, which is equal to angular speed * radius.
Collection of data
We used a stop watch to measure the time it took to spin the bob 20 rotation (which we counted manually) with different speeds. We measured the force of tension on the string with a force sensor, which can then derive the bob's acceleration using Newton's Second Law.
Lab setup
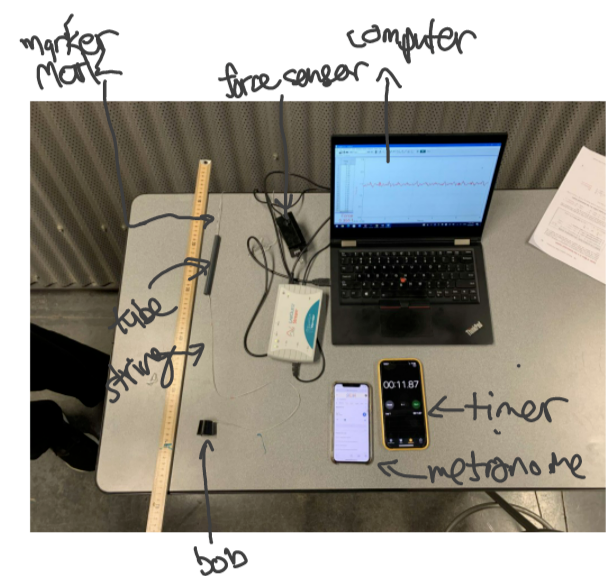
(Figure 1)
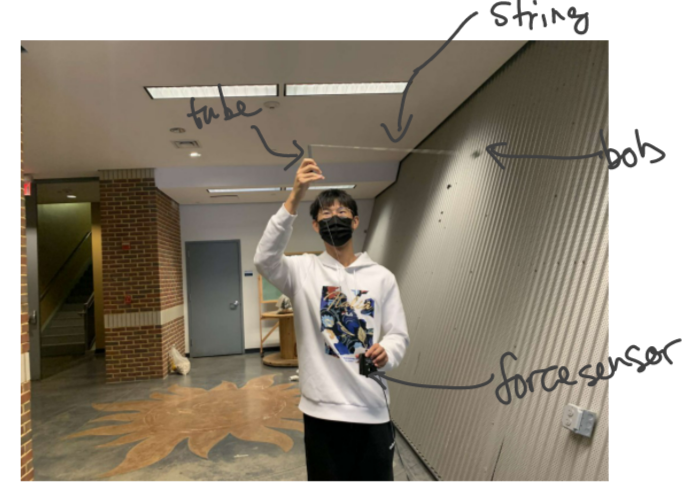
(Figure 2)
A string has one end attached to the force sensor and the other end attached to a bob. There is a tube in the middle, which helps set the radius of the path that the bob spins (which we set constant to 0.6m). We also used a blue marker to mark the correct position of the glass tube to maintain the same radius while we spin the bob. We used a phone to time and another phone with a metronome to ensure that we spin the bob at a constant rate.
Procedure
- Hold the force sensor and the tube. Do NOT pull the force sensor or let it go. Start the metronome.
- Start spinning the bob with the tube every time the metronome beats.
- Once the string above the tube is parallel with the floor, start the stopwatch and start counting the rotations and start the force sensor.
- Once the bob rotates 20 times, stop the timer.
- Record the time it took to rotate the bob 20 times and the average force from the readings of the force sensor.
- Repeat the previous steps, rotating the bob at different speeds.
Raw Data
The time is how long it took for the bob to rotate 20 times. The force is the tension force of the string, which accelerates the bob.
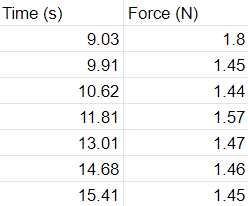
(Figure 3)
Processed Data
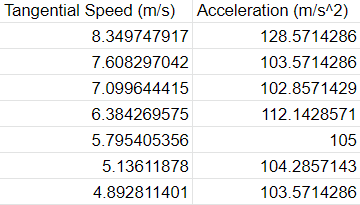
(Figure 4)
The tangential speed (in meters/second) can be calculated by the angular speed (in radians/second) times radius (in meters). The tangential speed (in radians/second) can thus be calculated by rotations/time * 2pi * radius. Since the experiment always have 20 rotations and a radius of 0.6m, we can simplify this equation to tangential speed = 1.2pi*20/t where t is the time in seconds that it took to rotate the bob 20 times. The acceleration can be found with Newton's Second Law of acceleration = net force/mass. The mass of the bob is always 0.014 kg, so our equation for acceleration is net force/0.014.
Graphs
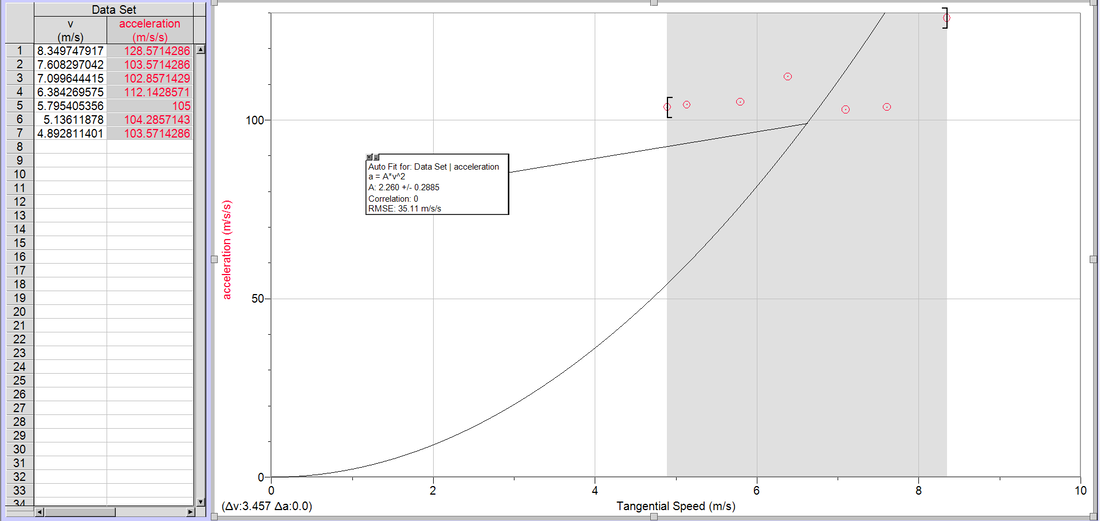
(Figure 5)
Figure 5 shows how the tangential speed of the bob affects its acceleration. There are many models we can choose from to fit the data. At the start, we tried a linear fit, but this suggests a nonzero y-intercept. This means that if I spin the bob at zero speed, it will have a nonzero acceleration, which does not make logical sense. Therefore we tried a proportional fit, where the y-intercept is zero. However, this suggests that when the speed is negative, which means to spin it in the opposite direction, I would have a negative acceleration, which means that the bob would accelerate away from the center of its path of rotation. But it stayed in its path and did not fly out of my hand. A proportional fit was incorrect. If the bob spins at a negative speed it should still have a positive acceleration towards the center of its path of rotation. A simple quadratic model of y=Ax^2 would meet both criteria. The best-fitting equation we got was A = 2.26v^2. The slope of the graph is increasing as speed increases. This means that for every increase in speed, the acceleration increases by more and more.
Purpose & Conclusion
The lab can help us prove the formula for centripetal acceleration, which is ac = v^2/r. In the graph, we used the model a = Av^2, but this constant A of 2.26 is relatively close to 1.667, which is 1 divided by the radius of the path 0.6. If we double the radius of the path an object rotates around, we half its centripetal acceleration. If we double the velocity that it rotates, we would quadruple its centripetal acceleration.
Centripetal acceleration occurs in a lot of motion in our daily lives. For example when you turn a car around a corner, the car has a centripetal acceleration. Instead of the force of tension, the net force acting on the car would be the static friction force between its wheels and the ground. But static friction has a maximum value, which is why when you turn a corner too tight (with a small radius), the car's centripetal acceleration could exceed the maximum acceleration that the static friction force can withstand and the car loses control and crashes into the curb. That is centripetal acceleration in action.
Centripetal acceleration occurs in a lot of motion in our daily lives. For example when you turn a car around a corner, the car has a centripetal acceleration. Instead of the force of tension, the net force acting on the car would be the static friction force between its wheels and the ground. But static friction has a maximum value, which is why when you turn a corner too tight (with a small radius), the car's centripetal acceleration could exceed the maximum acceleration that the static friction force can withstand and the car loses control and crashes into the curb. That is centripetal acceleration in action.
Evaluation
One source of uncertainty in this experiment was the range of the data. If we spun the bob at a speed too low, the string would dangle down and make the radius less than 0.6m. We also could not spin the bob too fast since it would be unsafe. Thus we had a small range of data. We also only did one trial for each speed. This makes the results uncertain as it could be affected by a variety of factors such as human errors in my spinning, human errors in timing and counting rotations.
Improvements
With the sources of uncertainty being said in the previous section, one way to improve the investigation is to collect a larger range of data under safer conditions where I can spin faster. It is always beneficial to have a bigger collection of data so we can fit the model much accurately. We can also conduct multiple trials for each speed to minimize the uncertainty from manual errors like spinning the bob at uneven speeds.
